
Ajuste de servosistemas: los fundamentos de la respuesta en frecuencia
Dado que los servosistemas contienen bucles de control basados en errores, el ajuste es un componente integral de cualquier máquina o planta puesta en marcha con éxito, especialmente porque tiene un impacto directo en el rendimiento. Un servosistema correctamente ajustado puede mejorar importantes parámetros del proceso, como la estabilidad, la precisión y la productividad, pero ¿cuál es la mejor manera de conseguir estos resultados?
Si la resonancia inherente del sistema se excita durante un proceso o una operación, es probable que se produzca una inestabilidad. En la mayoría de los casos, si los parámetros de seguridad del motor están configurados correctamente, este problema se traducirá en poco más que un ruido audible y un mensaje de error que indica que el motor ha recibido demasiada corriente, lo que desactiva el eje. Sin embargo, en algunos casos, puede dar lugar a daños mecánicos que se producen cuando el movimiento incontrolado golpea la carga contra el tope provocando la interrupción del proceso. El coste de un mal ajuste se traduce en una reducción significativa de la velocidad de producción y en posibles daños al equipo.
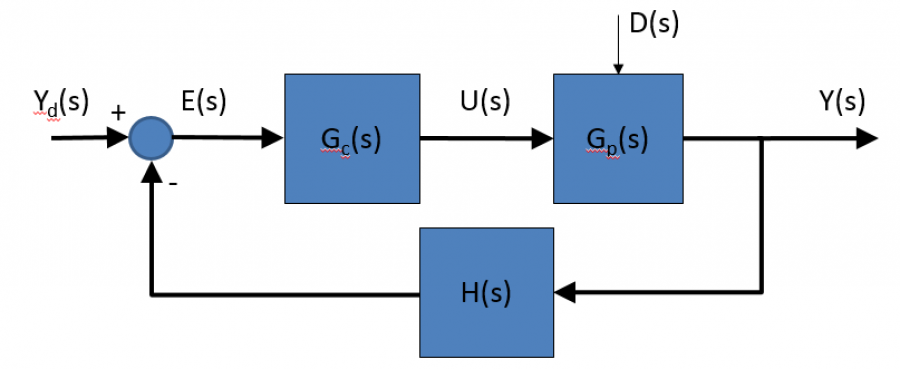
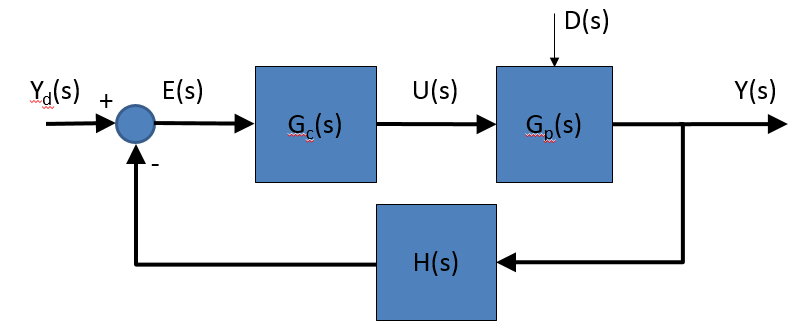
Antes de pensar en posibles soluciones de ajuste, es conveniente revisar el problema general. Consideremos un ejemplo de aplicación que requiere el control de la salida de una masa inercial para que una máquina pueda realizar un movimiento en una dirección específica, o a una posición establecida (donde un sensor mide la respuesta de salida). Al restar la señal de respuesta (Y) de la señal deseada (Yd), se obtiene una señal de error (E), sobre la que el controlador puede actuar para proporcionar a la máquina una señal de actuación (U). Si el controlador es estable y robusto, la salida seguirá la entrada deseada en presencia tanto de perturbaciones externas (D) como de alguna variación de la planta. Las salidas típicas del sistema que se controlan son la posición, la velocidad, la corriente o la fuerza, pero cualquier variable del sistema que pueda medirse (o al menos estimarse) puede someterse a un control de bucle cerrado. A menudo, el proceso de ajuste tiene lugar en el dominio del tiempo, pero los ingenieros pueden beneficiarse utilizando el dominio de la frecuencia para mejorar aún más el rendimiento.
Una pregunta habitual es por qué es necesario un sistema de bucle cerrado. En pocas palabras, la presencia de errores en el sistema, que provienen de fuentes como la fricción, el desequilibrio de la masa, el error de los sensores, el ruido eléctrico, el par de engranaje/torsión, la variación de la planta y las perturbaciones ambientales, afectarán a la salida del sistema de forma no deseada. Si no existieran estas fuentes de error, el control de bucle abierto funcionaría bien.
¿Dominio de tiempo o de frecuencia?
La mayoría está familiarizada con los controladores PID estándar, y sabe cómo cambia la salida de la respuesta escalonada del sistema a medida que se aumentan o disminuyen las diferentes ganancias. Aunque se trata de una operación bastante común, el problema con el dominio del tiempo es la ausencia general de una comprensión real del carácter de la estructura de resonancia que hay que controlar.
El uso del dominio de la frecuencia para la sintonización proporciona más información, que, cuando se utiliza junto con la información del dominio del tiempo, puede dar lugar a un rendimiento óptimo del servosistema para el movimiento específico requerido del sistema.
En términos básicos, una respuesta en frecuencia es la respuesta en estado estacionario de un sistema a una entrada sinusoidal. Para los sistemas lineales, la salida tendrá la misma frecuencia que la de entrada, pero puede tener una magnitud y una fase diferentes. En cada frecuencia, la magnitud y la fase de la salida se comparan con la magnitud y la fase de la entrada. La magnitud y la fase de esta comparación se representan en función de la frecuencia, lo que se denomina gráfico de Bode. La mayoría de los controladores tienen herramientas para medir la respuesta en frecuencia de un sistema. Existen varios métodos para recoger la respuesta en frecuencia, siendo los más comunes los sinusoides discretos, el ruido blanco y los métodos multiseno.
Los gráficos de Bode no son la única herramienta del dominio de la frecuencia utilizada en los sistemas de control. A menudo se utilizan las FFT (Fast Fourier Transforms) para estudiar el contenido en frecuencia de una señal temporal. Esto puede ser útil para encontrar la frecuencia de una oscilación. El diagrama de Bode proporcionará más información, como la anchura y la profundidad de la resonancia y, sobre todo, el efecto de la resonancia en la estabilidad del sistema.
Utilizando las herramientas
Para utilizar las herramientas es útil disponer de un modelo del sistema. Pensando en el sistema como un conjunto de masas conectadas por muelles y amortiguadores, es posible crear un modelo matemático del sistema que puede utilizarse para predecir la respuesta del sistema a una entrada específica, como un paso. La complejidad del modelo aumenta con el número de masas consideradas. Por esta razón, a menudo un modelo de dos masas es suficiente para predecir las respuestas de primer orden y puede utilizarse para saber cómo afinar el sistema.
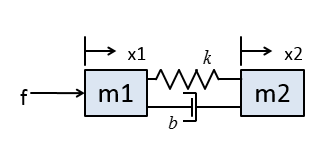
Consideremos un eje lineal con una carga que debe posicionarse con precisión. La tarea a realizar es controlar la posición de la segunda masa en función de la fuerza aplicada a la primera. La posición de la masa 2 dependerá de los efectos del muelle, del amortiguador, de la relación relativa de las masas y de cualquier perturbación en el sistema, como la fricción creada por los rodamientos o los errores debidos al sensor que mide la posición de la masa 1. No siempre es posible o rentable medir la posición de la masa 2.
Al considerar la reacción del sistema a una entrada, hay dos parámetros de interés en el dominio de la frecuencia: el ancho de banda y el damping (amortiguación). Un mayor ancho de banda es sinónimo de un tiempo de subida más rápido y de un mejor rendimiento general del sistema, mientras que la disminución del damping equivale a una mayor oscilación. Un ancho de banda alto y damping bajo suelen implicar un mayor rendimiento de la máquina.
Ganancia de bucle: camino hacia la estabilidad
Cuando se habilita un eje, el golpe incontrolable contra el tope (hardstop) suele llevarnos a considerar el ajuste del sistema. Sin embargo, la presencia de un paso o pico elevado en un sistema también puede indicar una inestabilidad. Por supuesto, es preferible afinar el sistema para que sea robusto, eliminando los pasos o picos elevados, las oscilaciones y los movimientos incontrolados. Cuando se utiliza el dominio del tiempo, esto no siempre es posible sin disminuir innecesariamente el rendimiento del sistema reduciendo el ancho de banda de un filtro de paso bajo hasta que la respuesta resonante esté suficientemente amortiguada. Utilizando el dominio de la frecuencia es posible optimizar los filtros de paso para amortiguar la respuesta resonante y mantener el ancho de banda más alto que cuando sólo se utilizan las técnicas de ajuste en el dominio del tiempo.
En un ejemplo práctico de utilización del dominio de la respuesta en frecuencia, considere la transmisión de bucle de un sistema que presenta una resonancia a 5 rad/sg. En este caso, los técnicos pueden utilizar un filtro de paso de profundidad y anchura similares para cancelar la resonancia de la máquina. Obsérvese que la resonancia sigue existiendo en el sistema mecánico, lo que significa que existe la posibilidad de excitarla, pero la inestabilidad será amortiguada por los filtros de paso y no desestabilizará el sistema.
Al eliminar la resonancia del bucle de control, es posible aumentar la ganancia total del sistema, ampliar el ancho de banda para proporcionar tiempos de subida más rápidos y, en última instancia, aumentar el rendimiento de la máquina. Bajo la planta, está en rojo, el filtro de pico está en verde y la respuesta resultante está en negro.
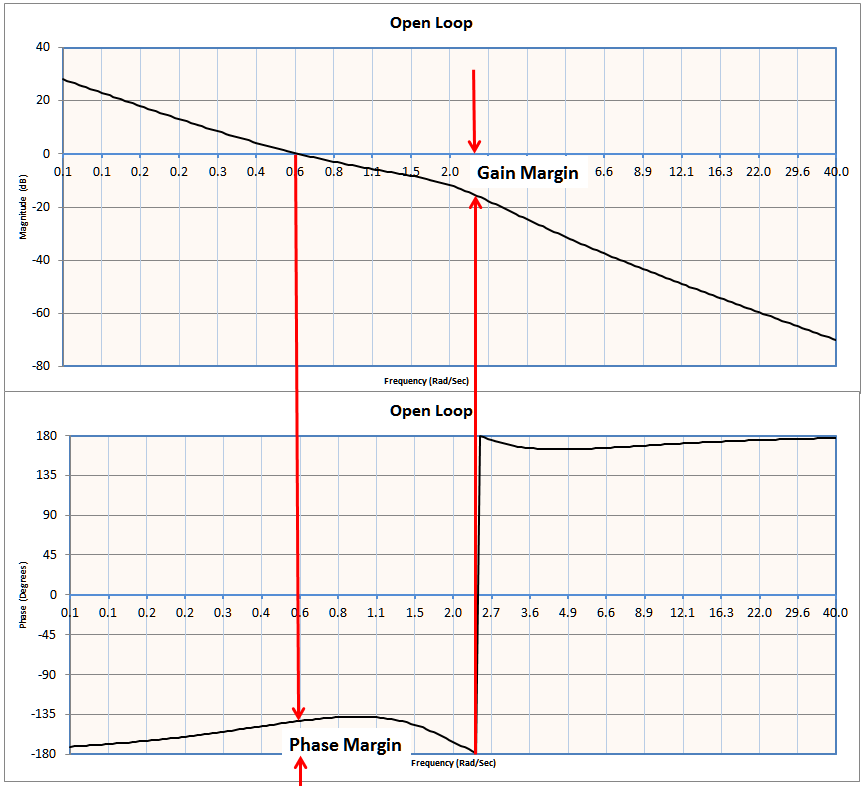
Cuando se realiza una estabilización, un buen objetivo es buscar el máximo ancho de banda y la mínima pérdida de fase, ya que casi siempre proporciona el resultado óptimo, aunque en la práctica suele ser necesario cierto nivel de criterio para determinar el margen aceptable. Cuando se observa un gráfico de transmisión de bucle, es importante no sólo examinar las frecuencias de cruce de fase para obtener un margen de ganancia suficiente, sino también las áreas alrededor de esos puntos para obtener márgenes de ganancia bajos.
Loop shaping, paso a paso
Antes de empezar a ajustar, no olvide apretar todos los tornillos y nivelar la máquina. Los siguientes pasos se aplican generalmente cuando se ajusta una masa inercial.
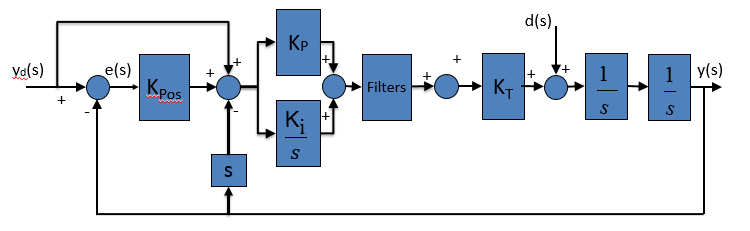
Para la estructura del lazo de control que se muestra arriba, el paso inicial de ajuste es establecer las ganancias Kpos y Kp a valores muy bajos con Kp = 10 Kpos y Ki = 0. A continuación, utilice la herramienta estándar de autoajuste para configurar un ancho de banda bajo y obtener un buen punto de partida para la conformación del lazo. El autoajuste estimulará el sistema con una serie de sinusoides y calculará un conjunto básico de ganancias con suficiente estabilidad para ejecutar una transmisión de bucle.
Después de recoger una transmisión de bucle, identifique el punto de máxima fase en el gráfico, entonces maximice la frecuencia de cruce basada en la pendiente del gráfico de fase aumentando la respuesta de magnitud. En este caso, hay que tener cuidado con los modos resonantes en las frecuencias bajas y medias y vigilar el margen de ganancia.
La siguiente tarea es introducir un filtro de paso bajo. Ajuste la frecuencia del filtro lo más alto posible para perder el menor margen de fase posible, pero lo suficientemente bajo para suprimir el ruido del sensor. Sin embargo, hay que tener cuidado de que el filtro no sea demasiado bajo, ya que reducirá el rendimiento de la máquina. Una buena regla general es aplicar un filtro de paso bajo a aproximadamente 10 veces la frecuencia de cruce, lo que evitará la pérdida de fase.
A continuación, aplique un filtro de corte en la frecuencia central de cualquier resonancia. Ajuste la profundidad y la anchura del pico para aplanar suficientemente la curva de ganancia en el pico. Ahora debería ser posible elevar la curva de ganancia manteniendo un margen de ganancia y un margen de fase suficientes. Los resultados positivos incluirán un mayor ancho de banda, una mejor estabilidad del eje y un mayor rendimiento de la máquina, ya que tendrá un tiempo de respuesta más rápido a las señales de entrada.
Para obtener las mejores prácticas, vuelva a utilizar el dominio del tiempo para ver cómo responde el sistema a operaciones específicas de la máquina, como el modelado. Repita este paso si es necesario. También este proceso debe repetirse en diferentes puntos de funcionamiento del sistema, incluyendo una variedad de ubicaciones y niveles de corriente.
El modelado del bucle en el sistema tiene muchas ventajas, entre las que destacan el uso de datos medidos en lugar de modelos analíticos para comprender el carácter resonante del sistema, el suministro de información sobre el efecto no lineal, las medidas cuantitativas de estabilidad y, lo que es más importante, la mejora del rendimiento del sistema con respecto al ajuste sólo en el dominio del tiempo.
Joseph Profeta Ph.D.,
Director - Control Systems Group, Aerotech

La automatización definida por software: el nuevo paradigma industrial impulsado por SIMATIC PCS neo
Un pilar de la planta autónoma

Una herramienta clave para acompañar la evolución de las infraestructuras gasistas hacia un modelo más flexible, eficiente y resiliente

")

La compañía tecnológica aprovechó también para presentar su nuevo hub logístico para Iberia

La sesión analizará el avance hacia modelos de operación industrial cada vez más autónomos en la industria química

EXPOQUIMIA 2026: KERN & SOHN presenta los equipos de laboratorio conectados en red en el Pabellón P2
Presentará en primicia el medidor de humedad KERN DIS, que proporciona resultados precisos incluso con una cantidad de humedad escasa


“En el ámbito industrial, DES juega un papel clave como punto de encuentro exclusivo entre empresas, proveedores tecnológicos, directivos y expertos”
Empresas destacadas

Comentarios