
Reducción de consumo energético en sistemas de paletizado robotizado
Si bien el consumo energético es un tema sensible en el momento de la generación de este documento estando como están de locos los precios de la energía a nivel mundial, será un tema cada vez más importante en el futuro a la hora de valorar la adquisición de un sistema de producción automatizada.
Esto ha sido importante desde siempre pero, como el problema afloraba en el usuario final después de haberse producido la venta de la instalación, el fabricante de maquinaria ha priorizado otros aspectos antes de los energéticos, pensando que sus esfuerzos no serían valorados positivamente y, al contrario, lastrarían su oferta con un coste inicial mayor.
Poco a poco se está viendo una sensibilidad en los posibles compradores de que dentro de la ficha técnica de la instalación se incluya una valoración del coste de explotación del conjunto que le permita una valoración a años vista y para diferentes escenarios de costes energéticos.
Planteemos un escenario de final de línea en el que un brazo robótico se encarga de paletizar unos bienes que llegan de una o varias líneas de entrada y se apilan en uno o varios palés de salida.
El trabajo del brazo es relativamente simple: empezando en una pose de reposo, espera la presencia de producto a la entrada. Llega al producto, lo coge de alguna manera, inicia el acercamiento al punto de dejada, donde lo colocará y se retirará de nuevo a la pose de reposo. Y así todo el día.
Dejando a un lado la energía necesaria consumida en la garra a la hora de tomar y dejar piezas, que podría dar para otro artículo, el principal consumo se produce en las aceleraciones. Cuanto más exigente (menor) sea el tiempo de ciclo necesario, mayor deberán ser las aceleraciones para llegar al régimen de velocidad lo antes posible.
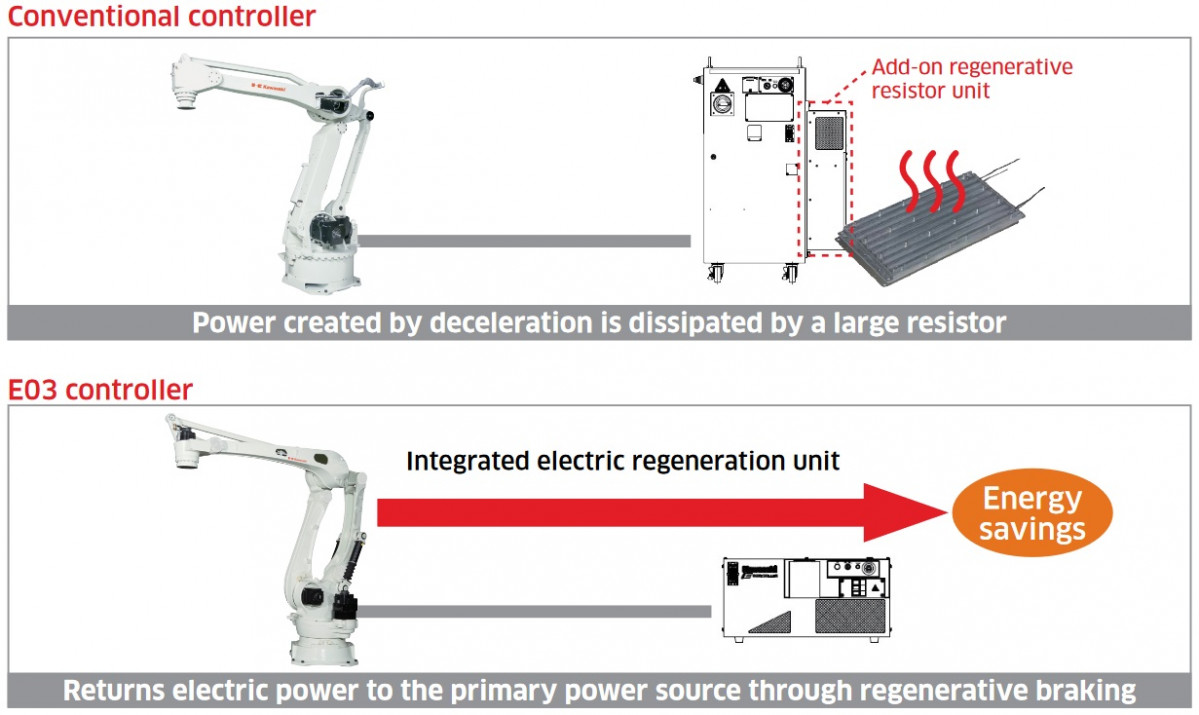
Las deceleraciones no consumen energía, al contrario, la generan. Esta energía que se produce pero que no hace falta en ese momento, y molesta, generalmente se hacía pasar por resistencias de frenado, quemándola, calentando aire. Nos vendría bien un poco más tarde, en la aceleración del siguiente movimiento, pero para entonces ya la hemos desechado.
Podemos adaptar el programa de nuestra automatización para reducir el consumo energético reduciendo las aceleraciones. Si el nivel de producción es tal que el robot se encuentra en pausa en ciertas partes del programa, por ejemplo, esperando la presencia de material a la entrada, no hace falta que al dejar el producto anterior en el palé nos embalemos a la posición de reposo. Si reducimos las deceleraciones reducimos también la energía desperdiciada.
Sin embargo, estas modificaciones se eliminan a la larga para tratar de maximizar la productividad de la célula robotizada, las aceleraciones y deceleraciones pasan a su valor máximo y el usuario aún querría que fuera más rápido.
Entramos pues en esa energía que se desperdicia, cada vez más cuanto más se exige a la instalación. ¿No habría una manera de aprovecharla?
Ojalá los controladores de los robots de paletizado contaran con un dispositivo que devolviera energía a la red aprovechando el excedente que genera el brazo en las frenadas. Especialmente porque este tipo de movimientos son aceleraciones y deceleraciones continuas: una pareja cada vez que se coge una pieza y una pareja cada vez que se deja.
Parece, además, un objetivo alcanzable. La energía llega a los motores a partir de una tensión continua. En las aceleraciones esta tensión tiende a bajar y el controlador la suple transformando energía de la entrada para subirla. En las deceleraciones tiende a subir pero no lo puede hacer de manera descontrolada; cuando alcanza un nivel determinado las resistencias de frenado se encargan de consumirla para mantenerla en un nivel seguro.
Si en lugar de tirar esa energía calentando resistencias el controlador se convirtiera en un generador que expulsa el exceso de energía sincronizada con la entrada, para esos movimientos de frenada, se trataría como un generador de autoconsumo, como una instalación fotovoltaica o una instalación eólica, para ese corto periodo. Esa energía sería aprovechada por el resto de equipamiento de la fábrica.
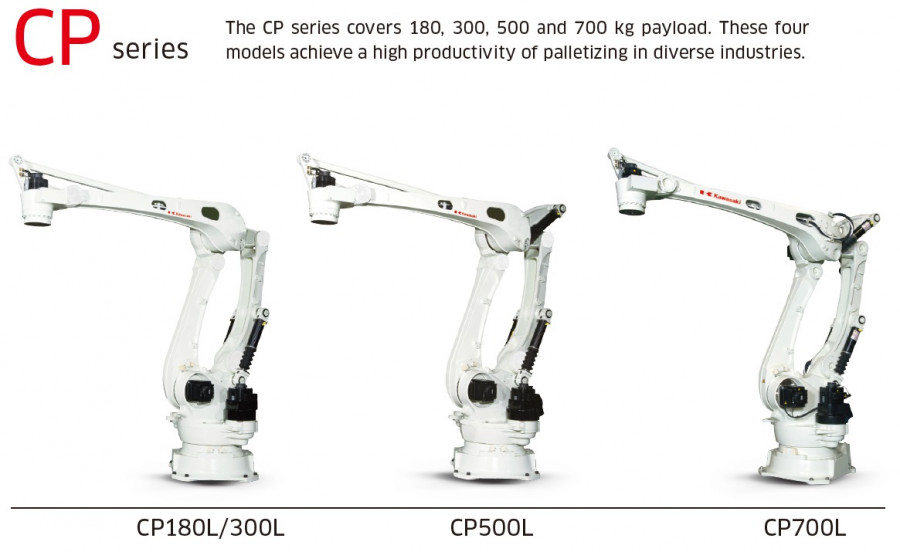
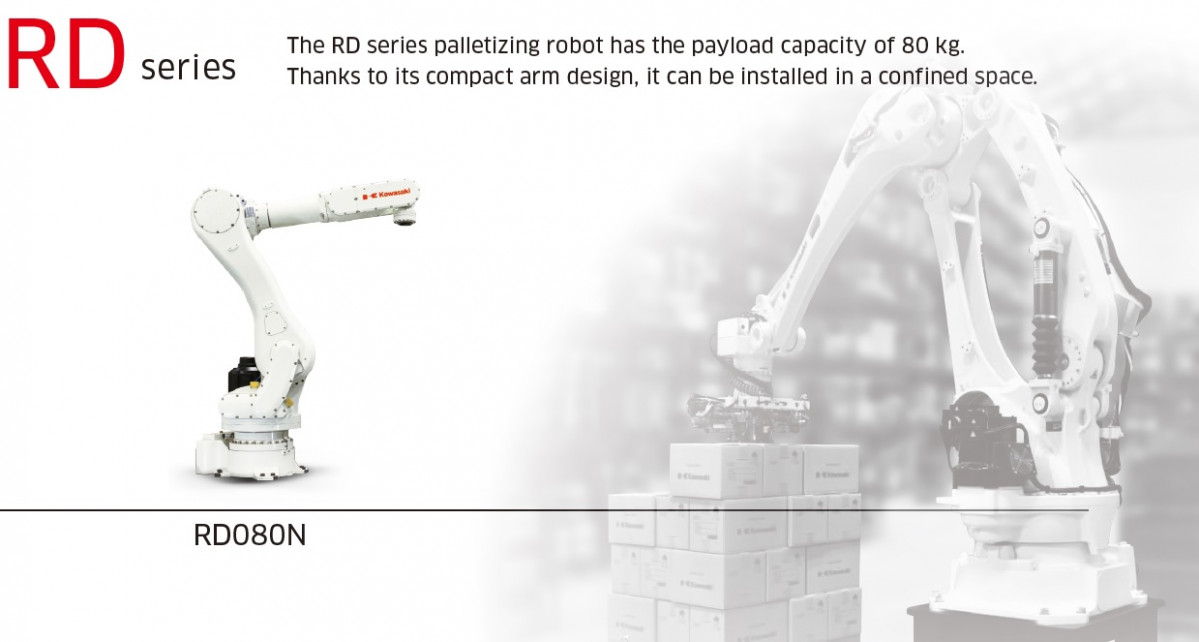
Pues esos controladores existen, se llaman E03 y son los encargados de que todos los robots de paletizado de Kawasaki Robotics operen a un nivel óptimo de consumo energético. Cuanto más exigente sea tu ciclo, más conveniente te resultará trabajar con los brazos de las series RD o CP.
La productividad de un brazo es algo difícil de calcular, pues depende del trabajo que se requiere. Sin embargo, existen determinados ciclos patrón con los que es posible comparar brazos entre sí. En el caso de paletizado, un ciclo patrón contempla un movimiento de subida de 400mm, desplazamiento de 2000mm, bajada de 400mm, ida y vuelta.
Kawasaki Robotics cuenta con dos series de robots. La serie RD para células compactas de producción media de 900 ciclos/hora para el ciclo patrón hasta 80 kilos, y la serie CP, el buque insignia en células de paletizado, con el que podemos llegar desde los 2050 ciclos/hora con 130 kilos de carga, hasta los 900 ciclos/hora con 700kg colgados en muñeca.
Toda la serie CP comparte los mismos alcances, mismas dimensiones de anclaje de base y de amarre en brida, de manera que el diseño de la célula puede abstraerse del modelo concreto de brazo para el que se realiza el desarrollo hasta el final. En la última fase se determina el brazo concreto en función de la carga a mover (garra + producto) y es aquí donde se puede plantearse la viabilidad de la optimización de la garra si con ello podemos elegir un brazo de mayor producción, lo que facilita el trabajo al integrador o fabricante de la línea y reduce los riesgos de oficina técnica ya que todos los robots de paletizado CP tienen la misma huella.
Los brazos de la serie CP de paletizado de Kawasaki Robotics además de extremadamente robustos y fiables, son muy ligeros comparados con brazos de características similares de otros fabricantes. La reducida masa móvil del propio brazo CP, unido a las propiedades regenerativas de los controladores E03, hacen de Kawasaki Robotics el robot de paletizado de menor consumo para el usuario final, con lo que la amortización de la instalación de paletizado es más rápida que en otras configuraciones de otras marcas. Es un retorno de inversión óptimo.
Larraioz Elektronika, como responsable del Kawasaki Robotics Iberian HUB, es el partner fiable y responsable que necesitan los integradores y fabricantes de maquinaria para resolver sus aplicaciones cada vez más exigentes de los procesos de paletizado y despaletizado. Por otra parte, los usuarios finales de las líneas de paletizado y encajado comandadas por los robots Kawasaki tienen en Larraioz Elektronika / Kawasaki Robotics Iberian HUB el servicio técnico de alta cualificación para garantizar un soporte post-venta de la mayor calidad.
Por Aitor Garmendia,
Responsable de producto en Larraioz Elektronika
Este artículo aparece publicado en el nº 537 de Automática e Instrumentación
Págs. 69 a 71.



Destaca por su enfoque tecnológico novedoso: funciona con su robot móvil autónomo estándar, sin sensores adicionales






El foro combinará el programa de conferencias con un espacio expositivo especializado los días 8 y 9 de septiembre en Fira Barcelona
Empresas destacadas

Comentarios