
IAI Es Mecatrónica

El manzanazo que recibió Sir Isaac Newton en la cabeza sirvió como base para establecer los principios de la mecánica y cinemática clásica que básicamente relacionan: Fuerza, masa, aceleración, distancia, tiempo, velocidad, energía,… variables con las que se trabaja diariamente en la industria.
La industria es movimiento controlado
La manzana cayendo es un ejemplo claro de movimiento no controlado o en lazo abierto.
Una vez el árbol selecciona la manzana adecuada por posición y altura (más altura = más energía cinética = más dolor de cabeza) se acabó el control y por si fuera poco existen variables externas no controladas que afectan a la trayectoria y velocidad de la manzana como son la densidad del aire, el viento, la aceleración de coriolis, la geometría de la manzana,… que hacen aún más difícil para el árbol predecir con exactitud el resultado final.
Pues resulta que aunque en la industria no dejamos caer manzanas, sí que movemos y mucho objetos y herramientas. Pero a diferencia del árbol, nuestro objetivo se debe cumplir sí o sí, y encima poderse repetir multitud de veces. Así que debemos conseguir movimientos que obedezcan fielmente a lo planeado, sin desviarse y sin ser afectados por variables externas no controladas.
En la industria tenemos multitud de tipos de movimientos con distintos propósitos. Una familia de movimientos la podemos agrupar porque lo que movemos es el objeto:
- Cambiar los objetos de sitio
- Orientar los objetos en determinada posición
- Mantener los objetos en una ubicación determinada o simplemente pararlos
- Coger objetos
- Acercar objetos entre sí para su combinación por ensamblaje
- …
Otra familia de movimientos la podemos agrupar porque lo que movemos es una herramienta:
- Herramientas de ensamblado
- Herramientas de mecanizado
- Herramientas de soldadura
- Herramientas de conformado por deformación
- ….
Esto da lugar a distintos dispositivos de movimiento controlado.
Un ejemplo es el siguiente que tiene actuadores lineales, rotativos, robots cartesianos, robots scara…
Mover controladamente no es algo sencillo
Producir movimiento controlado requiere de la combinación de distintas tecnologías y campos de la ingeniería. La búsqueda del control de movimiento ha ido dando lugar a distintos componentes y estrategias dependientes de la tecnología del momento, que básicamente son:
- Guías lineales para transformar mecánicamente movimiento rotativo en lineal o desmultiplicar el rotativo por medio motores eléctricos controlables
- sensores: de posición, temperatura, intensidad, par,…
- drivers o sistemas de generación de potencia para los motores controlables
- CPU para realizar secuencias de movimientos y otras tareas
- Software de usuario para controlar lo anterior
Todos esos componentes no fueron diseñados de forma armónica buscando un objetivo común y una sencilla integración entre sí, lo cual ha supuesto una traba técnica y económica al avance del movimiento eléctrico controlado. Para solventar esta situación nace una nueva rama de la ingeniería, la Mecatrónica.
Que es la mecatrónica
Si en vez de ir combinando dispositivos unitarios trazamos un plan en el que un equipo multidisciplinar trabaja para obtener un resultado sinérgico de todas estas tecnologías, conseguimos el óptimo en cada una de ellas. Son muchas tecnologías al mismo tiempo:
Esta perspectiva del la resolución del problema del movimiento como un todo comenzó en los años 60 del siglo pasado y sin ella ahora no tendríamos robots, por poner un ejemplo. Esta forma de hacer permite optimizar los costes del sistema y no solo sin perder prestaciones sino que gracias al software permitir adquirir funcionalidades imposibles solo con la mecánica y la electrónica por separado.
IAI y la mecatrónica
IAI es una empresa de alta tecnología Japonesa fundada en 1976, que con más de 1.253 empleados y presencia en todos los continentes.
En 1986 introdujo en el mercado el primer robot lineal programable con CPU propia, lo que algunos llaman actuadores o ejes lineales servocontrolados.
Este producto supuso una innovación industrial importante que colocó a IAI en la vanguardia de los sistemas de movimiento lineal eléctrico. Pero ese espíritu innovador lo ha mantenido hasta el día de hoy y permitiéndole alcanzar sobre el 60% de la cuota del mercado del actuador eléctrico y robots cartesianos en Japón, probablemente el mercado más competitivo y exigente en este tipo de componentes.
Los procesos de fabricación y productos de IAI se conciben para ser lo más respetuosos posibles con el medio ambiente, buscando principalmente el ahorro energético, la durabilidad y la sencillez de reparación que redunda en una menor cantidad de residuos lanzada al medio ambiente.
IAI, la navaja suiza de la mecatrónica
IAI centra sus esfuerzos en conseguir componentes mecatrónicos que proporcionen mejora de la productividad de sus clientes junto con una facilidad de uso que no requiera conocimientos específicos. Esto lo consigue con altas prestaciones mecánicas y eléctricas sin perder fiabilidad, prestando especial atención al software que es el que proporciona la facilidad de uso que permite aprovechar las características de los equipos.
Su última familia de actuadores son los elecylinders, que suponen en estado del arte en cuanto al concepto de mecatrónica aplicada por integrar totalmente todos sus componentes complejos en un solo cuerpo mecánico y con un uso sencillo para cualquier persona.
IAI dispone de una impresionante gama de dispositivos que nos permiten automatizar cualquiera de las operaciones que describíamos en el primer punto de este artículo.
En esta tabla te lo resumimos de un vistazo:
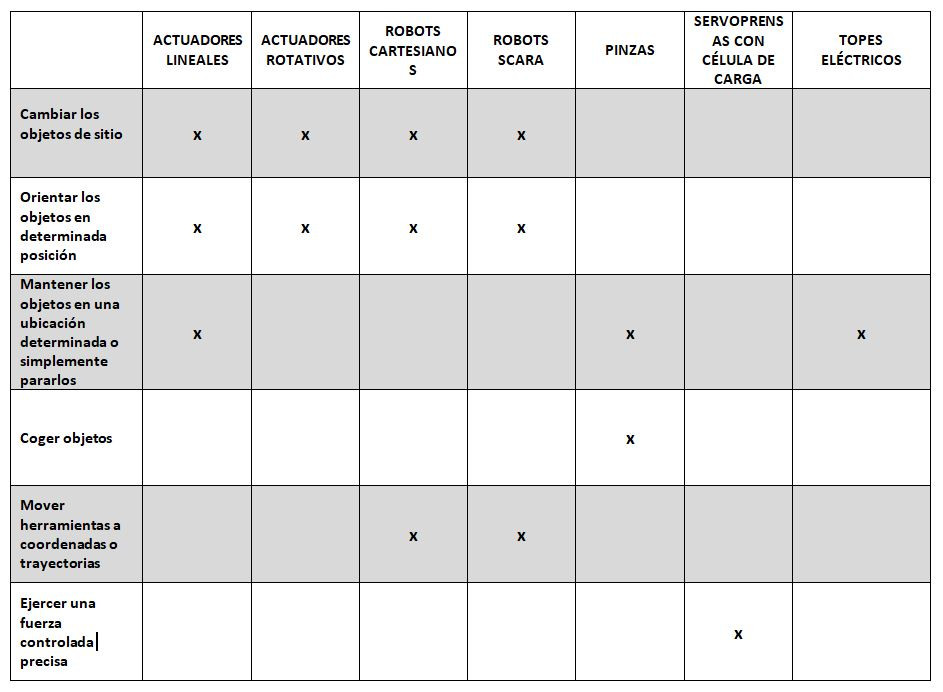
Por ello supone una solución integral tanto para ingenierías como para usuarios finales. Una vez seleccionado el equipo por las prestaciones requeridas solo queda descargarse el dibujo en CAD para integrarlo en el proyecto con la garantía de que todo va a funcionar a la primera y obteniéndose las prestaciones elegidas, sin sorpresas ni trabajos extra de integración.
Larraioz Elektronika
Este artículo aparece publicado en el nº 539 de Automática e Instrumentación págs. 56 a 57.



Destaca por su enfoque tecnológico novedoso: funciona con su robot móvil autónomo estándar, sin sensores adicionales






El foro combinará el programa de conferencias con un espacio expositivo especializado los días 8 y 9 de septiembre en Fira Barcelona
Empresas destacadas

Comentarios